騎上川崎重工的機器山羊,當一名科技牛仔
在西部電影裏,我們能看到騎在馬背上馳騁,偶爾還會在牛背上競技的牛仔。技術的進步,讓牛仔的代步工具逐漸被各類機械製品所代替。但如今,或許還有另一種方式——把動物和機器合二為一。
▲ 圖片來自:Unsplash
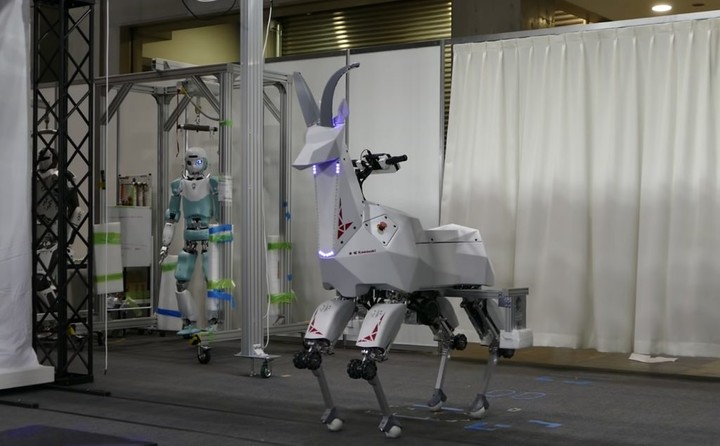
不久前的 iREX(日本東京國際機器人展會)上,川崎重工展示了一款機器山羊「BEX」,它的外觀設計靈感來自某種山羊。身上裝有可以發光的喇叭,背上有座椅和可扶的把手,最多可負載 100 公斤進行移動。
▲ BEX,圖片來自:CNET
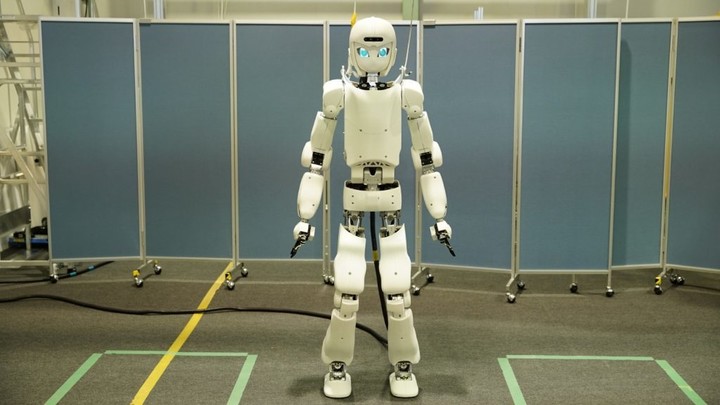
展示「BEX」的川崎重工,是一家在製造工業機器人的技術上有超過半個世紀積累的公司。該公司於 2015 年開始開發一款人形機器人——「Kaleido」,2017 年發佈第一代後不斷進行更新,不久前的 2022 年 iREX 展會上已升級至第七代。
▲ Kaleido,圖片來自:川崎重工
人在行走時膝蓋會自然地進行屈伸,但讓雙足機器人完成同樣的姿勢卻並不是件易事。擁有 RHP7 的最新 Kaleido(RHP 是 Robust Humanoid Platform 的縮寫,意為健壯的人形平台),藉助「動態運動支持」技術實現了更自然地行走,可達到 4 公里/小時的人類平均步行速度。
▲ RHP Friends,圖片來自:川崎重工
為了讓 Kaleido 身上的技術能早日應用於社會,川崎重工在開發兩種源自 Kaleido 的機器人,一個是身形更為纖細的人形機器人「RHP Friends」,另一個就是四足步行機器人「RHP Bex (BEX)」
▲ BEX,圖片來自:CNET
Kaleido 的開發過程中,雙足機器人的難處逐漸顯現。由於仿人機器人與人類有相同的形狀,因此它們用途廣泛,有潛力去完成人類能做的事情,但要投入實際使用還需要很長時間。
川崎重工選擇開發四足步行機器人 BEX ,是認為在仿人機器人研發過程中培養出來的行走技術,可以應用在四足行走機器人上。
▲ BEX,圖片來自:川崎重工
川崎重工已將這款 BEX 定位為人形機器人之一,並會繼續進行開發。四足行走的機器人已存在,但像人形機器人一樣的並不多。BEX 下半身的肢體,有可變換姿勢的「混動系統」。除了可以站立行走,在較為光滑的平面上,它還可以屈膝,利用「關節」處的膝輪快速移動。
▲ BEX,圖片來自:CNET
目前 BEX 可以用來運載運載輕型貨物或農作物,還能通過攝像頭的圖像進行工業廠房檢查。此外, BEX 不僅是在移動方式上有靈活度,它的功能也能靈活調整。
▲BEX,圖片來自:CNET
雖然底座是人形機器人,但 BEX 的上半身並不是固定的,川崎重工正在考慮根據實際應用場景(如建築工地和植物種植等)對它進行調整,想通過專注於下半身的四條腿,將 BEX 打造成一個開放的創新平台。
▲BEX,圖片來自:川崎重工
如果想打造一個現代化牧場,也可以考慮把騎馬改為騎「機器山羊」,但以 BEX 目前的速度來説,想乘着它「馳騁」或是參加賽馬比賽,恐怕不太可能。
資料來源:愛範兒(ifanr)
▲ 圖片來自:Unsplash

不久前的 iREX(日本東京國際機器人展會)上,川崎重工展示了一款機器山羊「BEX」,它的外觀設計靈感來自某種山羊。身上裝有可以發光的喇叭,背上有座椅和可扶的把手,最多可負載 100 公斤進行移動。
▲ BEX,圖片來自:CNET
展示「BEX」的川崎重工,是一家在製造工業機器人的技術上有超過半個世紀積累的公司。該公司於 2015 年開始開發一款人形機器人——「Kaleido」,2017 年發佈第一代後不斷進行更新,不久前的 2022 年 iREX 展會上已升級至第七代。
▲ Kaleido,圖片來自:川崎重工

人在行走時膝蓋會自然地進行屈伸,但讓雙足機器人完成同樣的姿勢卻並不是件易事。擁有 RHP7 的最新 Kaleido(RHP 是 Robust Humanoid Platform 的縮寫,意為健壯的人形平台),藉助「動態運動支持」技術實現了更自然地行走,可達到 4 公里/小時的人類平均步行速度。
▲ RHP Friends,圖片來自:川崎重工
為了讓 Kaleido 身上的技術能早日應用於社會,川崎重工在開發兩種源自 Kaleido 的機器人,一個是身形更為纖細的人形機器人「RHP Friends」,另一個就是四足步行機器人「RHP Bex (BEX)」
▲ BEX,圖片來自:CNET

Kaleido 的開發過程中,雙足機器人的難處逐漸顯現。由於仿人機器人與人類有相同的形狀,因此它們用途廣泛,有潛力去完成人類能做的事情,但要投入實際使用還需要很長時間。
川崎重工選擇開發四足步行機器人 BEX ,是認為在仿人機器人研發過程中培養出來的行走技術,可以應用在四足行走機器人上。
▲ BEX,圖片來自:川崎重工

川崎重工已將這款 BEX 定位為人形機器人之一,並會繼續進行開發。四足行走的機器人已存在,但像人形機器人一樣的並不多。BEX 下半身的肢體,有可變換姿勢的「混動系統」。除了可以站立行走,在較為光滑的平面上,它還可以屈膝,利用「關節」處的膝輪快速移動。
▲ BEX,圖片來自:CNET

目前 BEX 可以用來運載運載輕型貨物或農作物,還能通過攝像頭的圖像進行工業廠房檢查。此外, BEX 不僅是在移動方式上有靈活度,它的功能也能靈活調整。
▲BEX,圖片來自:CNET

雖然底座是人形機器人,但 BEX 的上半身並不是固定的,川崎重工正在考慮根據實際應用場景(如建築工地和植物種植等)對它進行調整,想通過專注於下半身的四條腿,將 BEX 打造成一個開放的創新平台。
▲BEX,圖片來自:川崎重工

如果想打造一個現代化牧場,也可以考慮把騎馬改為騎「機器山羊」,但以 BEX 目前的速度來説,想乘着它「馳騁」或是參加賽馬比賽,恐怕不太可能。

資料來源:愛範兒(ifanr)