Meta AI 的這些新技術,讓機器人擁有「觸覺」
人工智能機器人發展到今天,其擁有「視覺」或者「聽覺」早已經見怪不怪。畢竟,這兩種感官幾乎是人類感知物理世界最重要的渠道。
而 Meta AI 的基礎人工智能研究團隊(FAIR)近日公佈的新技術,則為機器人賦予了「觸覺」。對此,Meta 的願景是使 AI 能夠「更豐富地瞭解世界」並「更好地理解和模擬物理世界」。
毫無疑問,這些新技術讓機器人又多了一種與世界互動的方式,也讓其在「類人」的道路上又向前了一步。
▲圖片來自:NewsBytes
Meta 正在與美國傳感器公司 GelSight 和韓國機器人公司 Wonik Robotics 合作,開發了一系列新技術,致力於將觸覺傳感器商業化,並將其用於人工智能當中。
這些新技術包括三個研究工具——「Sparsh」、「Digit 360」和「Digit Plexus」,專注於觸覺感知、機器人靈巧性和人機交互。此外,Meta 還引入了「PARTNR」,這是一種新的基準測試,用於評估人機協作中的規劃和推理。
需要注意的是,這些新技術目前並未為消費者推出,而是面向科學家和研究人員的。
▲圖片來自:Techopedia
Sparsh 是第一個用於基於視覺的觸覺感知的通用編碼器模型,由華盛頓大學和卡內基梅隆大學合作開發。
聽起來似乎有些抽象,既然是「觸覺」,為什麼又「基於視覺」呢?
實際上,傳統方法依賴於特定任務和傳感器的手工模型,其需要將物體的「觸摸參數」(例如力量、摩擦等等)打包成「感覺標籤」餵給機器人,相當於告訴機器人什麼是「輕輕地拿」或者「用力地推」。
然而這種方法比較麻煩,因為需要為每個不同的任務和不同的傳感器收集很多這樣的標籤數據。
Sparsh 則通過自我監督學習(SSL)從經驗中自主學習,不需要告訴它每個動作對應的標籤。其在一個包含 460000 多個觸覺圖像的大型數據集上進行預訓練,這就像是讓機器人看很多不同的物體和場景,然後自己學習如何識別和處理這些物體。
簡單來説,Sparsh 就像是讓機器人通過看大量的圖片和視頻來自學如何「感覺」物體,而不是通過人工給它的「感覺」打標籤。這樣,機器人就更容易學會如何在不同的任務中使用不同的觸覺傳感器了。
有趣的是,「Sparsh」這個名字源自梵語,意為「觸摸或接觸感官體驗」,這與它處理數字化觸覺信號並實現觸摸感知的功能非常貼切。
▲圖片來自:Meta
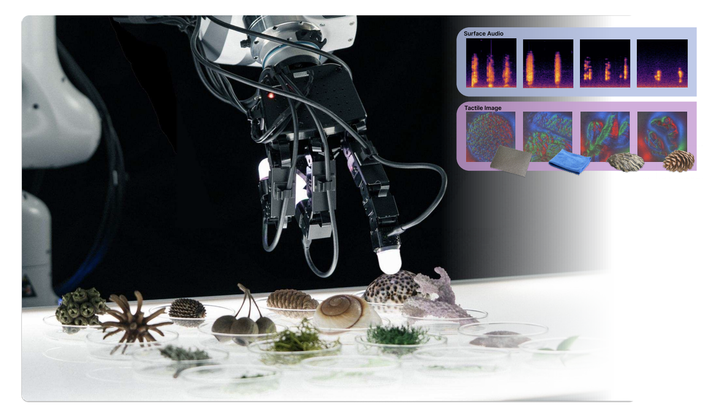
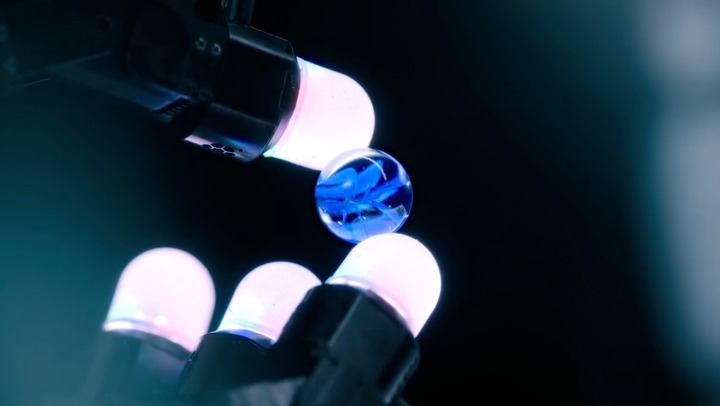
Digit 360 是由 Meta 與 GelSight 公司聯合開發的一種人造手指形狀的觸覺傳感器,它通過以人類級別的精度對觸摸進行數字化,能夠提供豐富而詳細的觸覺數據。
Digit 360 配備超過 18 種傳感功能,允許研究人員結合各種傳感技術或者分離單個信號以深入分析每種模式。
它可以檢測空間細節的微小變化,能夠捕獲小至 1 毫牛頓的力,並且包含多種傳感模式,可以感知振動、熱量甚至氣味,性能明顯優於以前的傳感器。
▲Digit 360 觸覺傳感器(右). 圖片來自:Meta
Meta AI 團隊還為其開發了一種寬視場的觸摸感知專用光學系統,由超過 800 萬個傳感器單元(taxels)組成,用於捕捉指尖表面的全向變形。
此外,藉助設備上的人工智能加速器,Digit 360 能夠快速處理信息,對觸摸刺激做出反應,可以充當機器人的周圍神經系統。這一設計的靈感來源於人類和動物的反射弧。
顯然,除了提高機器人的靈活性以外,這款傳感器在醫學、假肢、虛擬現實和遠程交互等領域都有廣闊的應用前景。
▲圖片來自:Meta
Meta 在博客中説道:
基於這個理念,Meta AI 與 Wonik Robotics 合作,提出並建立了一個標準化軟硬件平台 Digit Plexus。
它允許將各種指尖和皮膚觸覺傳感器(例如 Digit、Digit 360 和 ReSkin)集成到一個機器人手中,並通過一根電纜將觸覺數據編碼並傳輸到主機計算機中,以實現無縫數據收集、控制和分析。
Plexus 系統的設計旨在簡化機器人應用的開發,特別是對於那些需要精細觸覺反饋的應用。通過使用 Plexus,開發者可以更容易地將觸覺傳感器技術集成到他們的機器人項目中,從而提高機器人的靈巧性和對物理世界的感知能力。
▲圖片來自:Techcrunch
值得一提的是,Meta 與 Wonik 的下一步合作重點是開發 Wonik 的新一代 Allegro Hand,這是一款配備 Digit 360 等觸覺傳感器的機器人手,它將在 Digit Plexus 平台上運行。
▲圖片來自:XELA
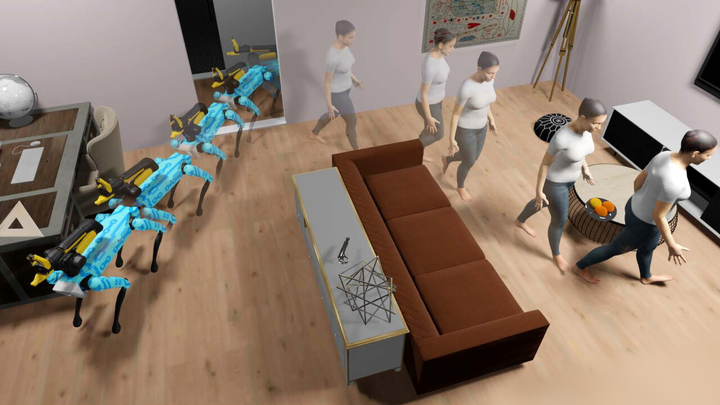
為了研究家庭活動中的人機協作,Meta 在 Habitat 3.0(一個用於研究家庭環境中人機協作任務的模擬平台)的基礎上,發佈了人機協作規劃和推理任務基準 PARTNR。
PARTNR 是同類中最大的基準,包含 100000 個自然語言任務,涵蓋 60 棟房屋和 5800 多個獨一無二的對象。該基準的目標是評估大型語言和視覺模型(LLMs / VLM)通過人機交互工具與人類協作的性能。
通過提供標準化基準和數據集,Meta 表示「希望它能使機器人的研究不僅能夠獨立運行,而且能夠圍繞人類運行,使它們更加高效、可靠,並且適應每個人的喜好」。
▲圖片來自:LinkedIn
讓機器人擁有「觸覺」,並不是一座「空中樓閣」。
這些機器人對外界變化擁有遠超人類的敏感度,配合高效的軟硬件協作系統,他們將會在外科手術或者精密儀器製造場景中大有用武之地。
其實,不僅「視覺」、「聽覺」和「觸覺」,賓夕法尼亞州立大學的研究人員已經在人工智能模型模擬出了「味覺」;同時,一家名為 Osmo 的公司已經教會人工智能模型如何模仿遠優於人類的「嗅覺」。
也許未來的機器人能夠在感官方面完全「復刻」人類。只是他們最好不要再擁有逼真的「人形」,否則,恐怖谷效應要犯了。
資料來源:愛範兒(ifanr)
而 Meta AI 的基礎人工智能研究團隊(FAIR)近日公佈的新技術,則為機器人賦予了「觸覺」。對此,Meta 的願景是使 AI 能夠「更豐富地瞭解世界」並「更好地理解和模擬物理世界」。
毫無疑問,這些新技術讓機器人又多了一種與世界互動的方式,也讓其在「類人」的道路上又向前了一步。
▲圖片來自:NewsBytes
Meta 正在與美國傳感器公司 GelSight 和韓國機器人公司 Wonik Robotics 合作,開發了一系列新技術,致力於將觸覺傳感器商業化,並將其用於人工智能當中。
這些新技術包括三個研究工具——「Sparsh」、「Digit 360」和「Digit Plexus」,專注於觸覺感知、機器人靈巧性和人機交互。此外,Meta 還引入了「PARTNR」,這是一種新的基準測試,用於評估人機協作中的規劃和推理。
需要注意的是,這些新技術目前並未為消費者推出,而是面向科學家和研究人員的。
▲圖片來自:Techopedia
Sparsh 是第一個用於基於視覺的觸覺感知的通用編碼器模型,由華盛頓大學和卡內基梅隆大學合作開發。
聽起來似乎有些抽象,既然是「觸覺」,為什麼又「基於視覺」呢?
實際上,傳統方法依賴於特定任務和傳感器的手工模型,其需要將物體的「觸摸參數」(例如力量、摩擦等等)打包成「感覺標籤」餵給機器人,相當於告訴機器人什麼是「輕輕地拿」或者「用力地推」。
然而這種方法比較麻煩,因為需要為每個不同的任務和不同的傳感器收集很多這樣的標籤數據。
Sparsh 則通過自我監督學習(SSL)從經驗中自主學習,不需要告訴它每個動作對應的標籤。其在一個包含 460000 多個觸覺圖像的大型數據集上進行預訓練,這就像是讓機器人看很多不同的物體和場景,然後自己學習如何識別和處理這些物體。
簡單來説,Sparsh 就像是讓機器人通過看大量的圖片和視頻來自學如何「感覺」物體,而不是通過人工給它的「感覺」打標籤。這樣,機器人就更容易學會如何在不同的任務中使用不同的觸覺傳感器了。
有趣的是,「Sparsh」這個名字源自梵語,意為「觸摸或接觸感官體驗」,這與它處理數字化觸覺信號並實現觸摸感知的功能非常貼切。
▲圖片來自:Meta
Digit 360 是由 Meta 與 GelSight 公司聯合開發的一種人造手指形狀的觸覺傳感器,它通過以人類級別的精度對觸摸進行數字化,能夠提供豐富而詳細的觸覺數據。
Digit 360 配備超過 18 種傳感功能,允許研究人員結合各種傳感技術或者分離單個信號以深入分析每種模式。
它可以檢測空間細節的微小變化,能夠捕獲小至 1 毫牛頓的力,並且包含多種傳感模式,可以感知振動、熱量甚至氣味,性能明顯優於以前的傳感器。
▲Digit 360 觸覺傳感器(右). 圖片來自:Meta

Meta AI 團隊還為其開發了一種寬視場的觸摸感知專用光學系統,由超過 800 萬個傳感器單元(taxels)組成,用於捕捉指尖表面的全向變形。
此外,藉助設備上的人工智能加速器,Digit 360 能夠快速處理信息,對觸摸刺激做出反應,可以充當機器人的周圍神經系統。這一設計的靈感來源於人類和動物的反射弧。
顯然,除了提高機器人的靈活性以外,這款傳感器在醫學、假肢、虛擬現實和遠程交互等領域都有廣闊的應用前景。
▲圖片來自:Meta
Meta 在博客中説道:
引用人手非常擅長向大腦發出從指尖到手掌的皮膚觸摸信息,這使得其在做出決定時能夠激活手部肌肉,例如如何在鍵盤上打字,或者與過熱的物體交互。實現嵌入式人工智能需要機器人手上的觸覺傳感和電機驅動之間的類似協調。
基於這個理念,Meta AI 與 Wonik Robotics 合作,提出並建立了一個標準化軟硬件平台 Digit Plexus。
它允許將各種指尖和皮膚觸覺傳感器(例如 Digit、Digit 360 和 ReSkin)集成到一個機器人手中,並通過一根電纜將觸覺數據編碼並傳輸到主機計算機中,以實現無縫數據收集、控制和分析。
Plexus 系統的設計旨在簡化機器人應用的開發,特別是對於那些需要精細觸覺反饋的應用。通過使用 Plexus,開發者可以更容易地將觸覺傳感器技術集成到他們的機器人項目中,從而提高機器人的靈巧性和對物理世界的感知能力。
▲圖片來自:Techcrunch
值得一提的是,Meta 與 Wonik 的下一步合作重點是開發 Wonik 的新一代 Allegro Hand,這是一款配備 Digit 360 等觸覺傳感器的機器人手,它將在 Digit Plexus 平台上運行。
▲圖片來自:XELA

為了研究家庭活動中的人機協作,Meta 在 Habitat 3.0(一個用於研究家庭環境中人機協作任務的模擬平台)的基礎上,發佈了人機協作規劃和推理任務基準 PARTNR。
PARTNR 是同類中最大的基準,包含 100000 個自然語言任務,涵蓋 60 棟房屋和 5800 多個獨一無二的對象。該基準的目標是評估大型語言和視覺模型(LLMs / VLM)通過人機交互工具與人類協作的性能。
通過提供標準化基準和數據集,Meta 表示「希望它能使機器人的研究不僅能夠獨立運行,而且能夠圍繞人類運行,使它們更加高效、可靠,並且適應每個人的喜好」。
▲圖片來自:LinkedIn
讓機器人擁有「觸覺」,並不是一座「空中樓閣」。
這些機器人對外界變化擁有遠超人類的敏感度,配合高效的軟硬件協作系統,他們將會在外科手術或者精密儀器製造場景中大有用武之地。
其實,不僅「視覺」、「聽覺」和「觸覺」,賓夕法尼亞州立大學的研究人員已經在人工智能模型模擬出了「味覺」;同時,一家名為 Osmo 的公司已經教會人工智能模型如何模仿遠優於人類的「嗅覺」。
也許未來的機器人能夠在感官方面完全「復刻」人類。只是他們最好不要再擁有逼真的「人形」,否則,恐怖谷效應要犯了。
資料來源:愛範兒(ifanr)